欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:库卡
上架时间:2022-1-7 发布者:wn
产品描述:在遇到难解决的问题,若不能自行解决,请咨询上海仰光科技有限公司,本公司是一家第三方工业机器人维修服务商。
一、固定机器人臂
操作步骤
1. 在机器人臂上装上吊索并固定。
2. 将吊索挂在起重机上。
3. 向上运行机器人,直到吊索已拧紧且绷紧。
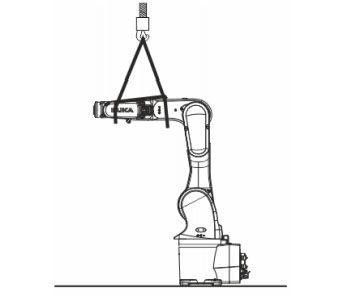
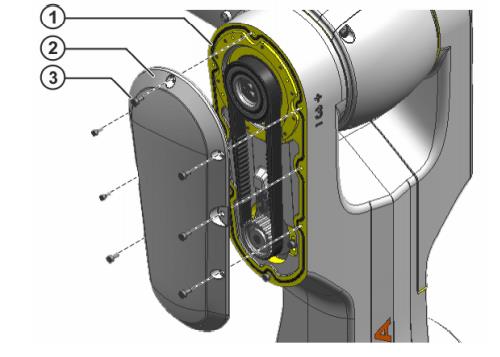
拆卸皮带侧盖板 A3
操作步骤
• 拧出皮带侧盖板 A3 上的 9 个内六角螺栓 M4x8-8.8
皮带侧盖板 A3
1 盖子
2 内六角螺栓 M4x8-8.8
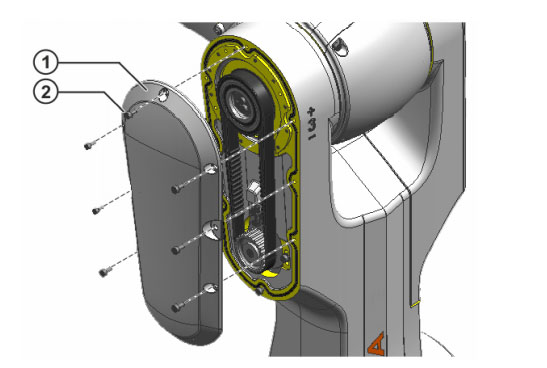
二、拆卸齿形带 A3
操作步骤
1. 松开 2 个内六角螺栓 M4x16-10.9。
2. 松开 1 个锁紧螺母 M4 和 1 个六角螺栓 M4x20-8.8。
3. 从齿形带轮上取下旧齿形带 A3。
1 轴 A3 的齿形带
2 锁紧螺母 M4 和六角螺栓 M4x20-8.8
3 内六角螺栓 M4x16-10.9
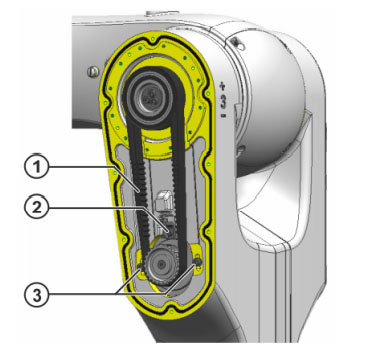
三、安装齿形带
A3 操作步骤 • 装上新的齿形带
A3。注意齿形带与齿形带齿轮应啮合正确
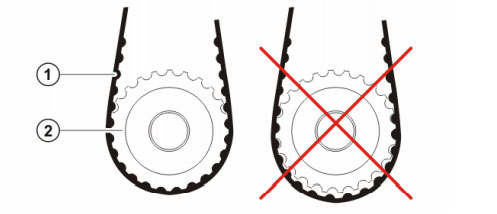
1 齿形皮带
2 齿形带齿轮
四、测量和调整齿形带张力 A3
操作步骤
1. 调整时要略微拧紧 1 个六角螺栓 M4x20-8.8。
2. 略微拧紧电机 A3 上的 2 个内六角螺栓 M4x16-10.9。
3. 将频率测量仪投入使用。
4. 拉紧齿形带,将齿形带中间的传感器与摆动的齿形带之间的距离保持在2 至 3 mm。在频率测量仪上读取测量结果。
5. 用规定的拧紧扭矩拧紧 2 个内六角螺栓 M4x16-10.9。
6. 将机器人投入运行并且沿两个方向运行 A3。
7. 通过按下紧急停止装置锁闭机器人。
8. 重新测量齿形带张力。
如果测量的值与表中的值不一致,则必须执行工作步骤 9 至 14。
9. 松开电机 A3 上的 2 个内六角螺栓 M4x16-10.9。
10. 借助六角螺栓 M4x20-8.8 重新张紧齿形带。
11. 用规定的拧紧扭矩拧紧 2 个内六角螺栓 M4x16-10.9。
12. 将机器人投入运行并且沿两个方向运行 A3。
13. 通过按下紧急停止装置锁闭机器人。
14. 重新测量齿形带张力。
如果测得的数值与表中的数值不一致,则重复工作步骤 9 至 14。
如果值一致:
a. 用规定的拧紧扭矩拧紧 2 个内六角螺栓 M4x16-10.9。
b. 用锁定螺母 M4 固定住 1 个六角螺栓 M4x20-8.8
齿轮带张力:
中央手腕:ZH Arm KR6 轴:3 齿形皮带:12 HTD-5M/450HP 频率:160 ±5 Hz
中央手腕:ZH Arm KR10 轴3: 齿形皮带: 12 HTD-5M/475 HP 频率:160 ±5 Hz
五:安装皮带侧盖板 A3 操作步骤
1. 小心清洁泡沫密封件。
2. 定位并装上盖板。
3. 用规定的拧紧扭矩拧入 8 个内六角螺栓 M4x8-8.8。
1 泡沫密封件
2 盖子
3 内六角螺栓 M4x8-8.8
六:最后的措施
必须采取以下最后的措施:
• 轴 A3 的零点标定。
• 在 T1 模式下运行程序并注意异常情况。
在遇到难解决的问题,若不能自行解决,请咨询上海仰光科技有限公司,本公司是一家第三方工业机器人维修服务商。