欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




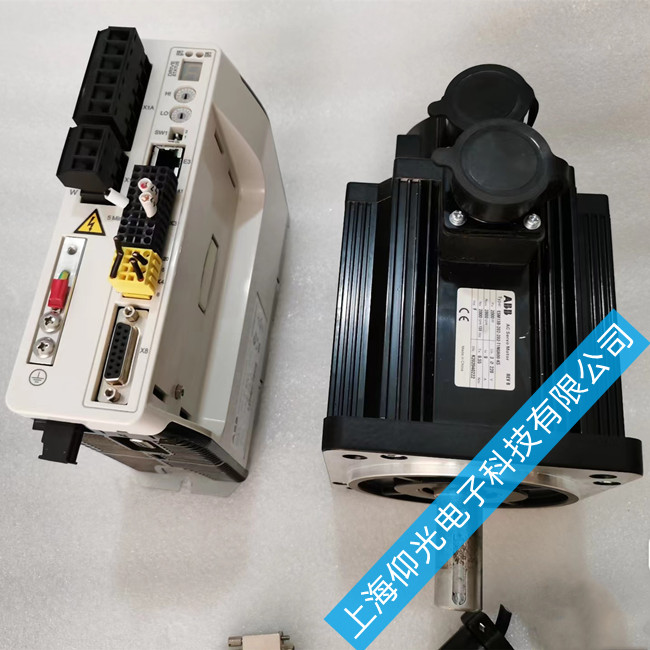
品牌:ABB
上架时间:2021-11-24 发布者:mzx
产品描述:ABB机器人维修时常见的九大故障解析 1、在什么情况下需要为机器人进行备份? 解析: ①新机器第一次上电后。 ②在做任何修改之前。 ③在完成修改之后。 ④如果机器人重要,定期1周一次。 ⑤最好在U盘也做备份。 ⑥太旧的备份定期删除,腾出硬盘空间。