欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:ABB
上架时间:2021-11-5 发布者:上海仰光
产品描述:碰撞检测建议: 一般来讲,为了便于碰撞检测,我们建议使用下面的规则: • 使用尽可能小的碰撞集,拆分大型部件,并只在碰撞集中收集相关部件。 • 导入几何体时,启用粗糙详情等级。 • 限制接近丢失的使用。 • 如果结果令人满意,可以启用最后的碰撞检测。
概述:
通过 RobotStudio,您可检测和记录工作站内对象之间的碰撞。下面介绍了碰撞检测的基本概念。
碰撞集:
碰撞集包含两组对象,ObjectA 和 Object B,您可将对象放入其中以检测两组之间的 碰撞。当 ObjectA 内任何对象与 ObjectB 内任何对象发生碰撞,此碰撞将显示在图形 视图里并记录在输出窗口内。您可在工作站内设置多个碰撞集,但每一碰撞集仅能包 含两组对象。
通常在工作站内为每个机器人创建一个碰撞集。对于每个碰撞集,机器人及其工具位 于一组,而不想与之发生碰撞的所有对象位于另一组。如果机器人拥有多个工具或握 住其它对象,可以将其添加到机器人的组中,也可以为这些设置创建特定碰撞集。 每一个碰撞集可单独启用和停用。
除了碰撞之外,如果ObejctA 与ObjectB 中的对象之间的距离在指定范围中,则碰撞检测也能观察接近丢失。
碰撞检测建议:
一般来讲,为了便于碰撞检测,我们建议使用下面的规则:
• 使用尽可能小的碰撞集,拆分大型部件,并只在碰撞集中收集相关部件。
• 导入几何体时,启用粗糙详情等级。
• 限制接近丢失的使用。
• 如果结果令人满意,可以启用最后的碰撞检测。
碰撞集结果:
您现已创建了一个碰撞集,RobotStudio将检查所 有对象的位置,并检测 ObjectA 内的对象与 ObjectB 内的对象碰撞的时间。 检测的启动和碰撞的显示取决于碰撞检测的设置方式。 如果碰撞集处于活动状态,RobotStudio 将检查组内对象的位置,并根据当前颜色设 置指示对象之间发生的任何碰撞。
碰撞检测:
碰撞检测能检查机器人或其他运动物体是否会与工作站内的其他设备产生碰撞。在复杂的工作站内,您可以使用多组碰撞集对不同组的物体进行碰撞检测。 碰撞检测在创建后会根据您的设定自动检测碰撞,不需您手动启动检测过程。
设置检测碰撞的时间:
如要设置始终或仅在仿真期间设置检测碰撞,请遵照下列步骤:
1 在文件菜单中,单击选项。
2 在导航窗格的左侧,选择 Simulation: Collision(模拟:碰撞)。
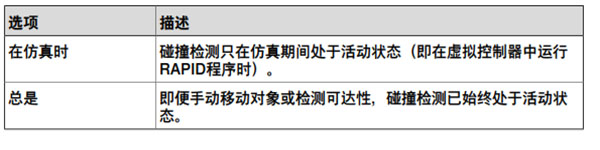
3 在“碰撞”页面右侧的进行碰撞检测中选择以下选项之一:
修改碰撞监控:
要修改碰撞监控,请按以下步骤操作:
1 邮件单击要修改的碰撞监控,然后从右键菜单选择修改碰撞监控。此时会打开修改碰撞监控对话框。
2 在对话框的各个字段中选择或输入要求的值。
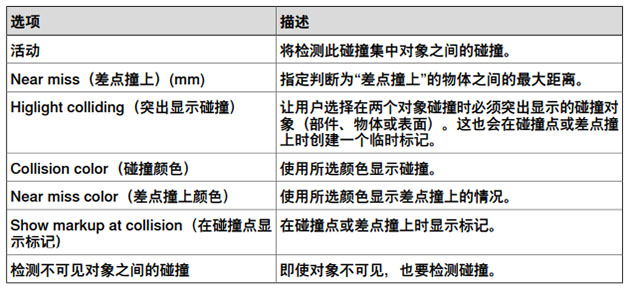
3 单击应用。 修改碰撞监控提供了以下选项:
设置碰撞检测对象:
要设置碰撞检测对象,请执行以下步骤:
1 确保碰撞检测对象在碰撞集中的位置正确无误。
2 确保为对象启动碰撞集,该碰撞集可以通过 布局 浏览器中的图标表示:
要启用或停用碰撞集,请继续下列步骤:
3 右击要修改的碰撞集然后单击 修改碰撞监控 以打开对话框。
4 选择或取消选中 Active(启用)复选框然后单击 Apply(应用)。
设置接近丢失检测:
碰撞集中的对象接近碰撞时,就会发生接近丢失。每个碰撞集都有各自的接近丢失设置。
要设置接近丢失检测,请执行以下步骤:
1 在布局浏览器中,右击要修改的碰撞集然后单击修改碰撞监控以打开对话框。
2 在Nearmiss(接近丢失)框中,指定要视为接近丢失的对象之间的最大距离, 然后单击 Apply(应用)。
设置记录选项:
除了以图形方式显示碰撞之外,也可将碰撞记录至输出窗口或单个日志文件:
1 在 File(文件)菜单中,单击 Options(选项),然后单击 Simulation(模 拟)下的 (碰撞)。
2 在导航窗格的左侧,选择 Simulation: Collision(模拟:碰撞)。
3 在“碰撞”页面的右侧,选择记录碰撞到输出窗口复选框。 碰撞日志将显示在输出窗口中。
4 在“碰撞”页面的右侧,选择记录碰撞到文件复选框,然后在框中输入日志文件的 名称和路径。 复选框下将创建一个记录碰撞的单独文件。