欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




概要:
机器人的当前位置,通过各轴的脉冲编码器的脉冲数值来确定。
工厂出货时,已经对机器人进行零点标定,所以在日常操作中并不需要进行零点标定。但是,下列情况,则需要进行零点标定。
・ 更换电机
・ 更换脉冲编码器
・ 更换减速机
・ 更换电线
・ 机构部的脉冲计数后备用电池用尽
注意:
包含零点标定数据在内的机器人的数据和脉冲编码器的数据,通过各自的后备用电池进行保存。电池用尽时将会导致数据丢失。应定期更换控制装置和机构部的电池。电池电压下降时,系统会发出报警通知用户。
零点标定的种类:
零点标定的方法如下。但是,软件版本7DC2系列(V8.20P)和之前的版本不支持简易零点标定(单轴)。
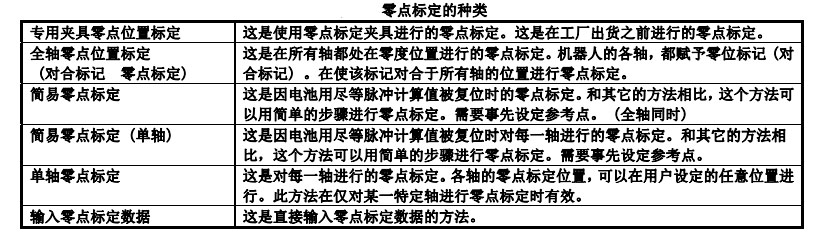
1. 在进行零点标定之后,务须进行位置调整(校准)。位置调整,是控制装置读入当前脉冲计数值并识别当前位置的操作。
2. 这里,就全轴零点位置标定、简易零点标定、单轴零点标定以及零点标定数据的输入进行说明。需要更加详细的零点标定(专用夹具零点位置标定)。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532