欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026



YAMAHA机器人 RCX240控制柜 机器人参数详情如下:
手持编程器的机器人参数编辑画面采用以下格式。
|
主组的设置值 : MG =〈值〉 主机器人的设置值 : MR =〈值〉 |
副组的设置值 : SG =〈值〉 副机器人的设置值 : SR =〈值〉 |
机器人参数设置
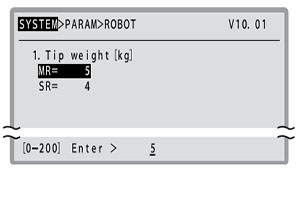
设置 2 台机器人时
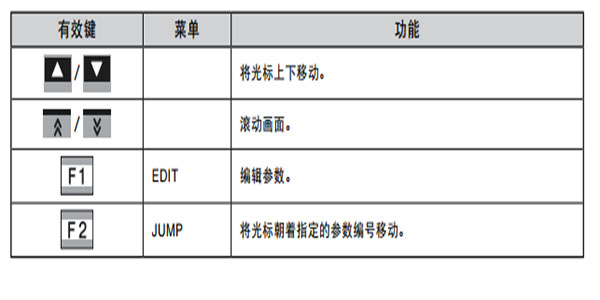
机器人参数编辑时的有效键及子菜单的内容如下。
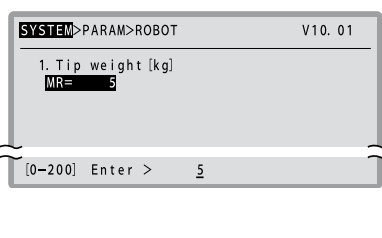
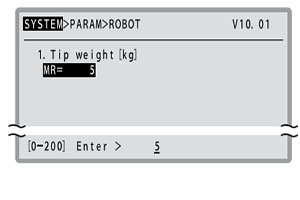
1.Tip weight [kg]/WEIGHT
以 kg 为单位设置机器人前端重量(工件重量+工具重量)。
但是,当设置的机器人为 YK120XG、YK150XG、YK180XG、YK220X 时,以 0.1kg 为单位设置。
最大值取决于所设置的机器人机型。
参数已初始化时,将设置为最大值。
1. 选择“1.Tip weight [kg]”。
请用光标键(↑/↓)选择“1.Tip weight[kg]”,并按 F1(EDIT)
2. 设置2台机器人时,选择要设置参数的机器人。
请用光标键(↑/↓)选择机器人。
3. 输入前端重量的数值。
用0~9输入数值,然后按 ENTER确定输入。
4. 按 ESC 退出编辑模式。
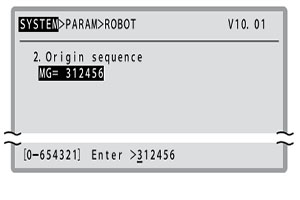
2. Origin sequence/ORIGIN
机器人通过数值设置确定马达位置的返回原点动作顺序。参数已初始化时,将设置为 312456。
1、2、3、4、5、6 分别对应各轴编号。按照从左至右的顺序,与数字对应的轴进行返回原点动作。
未设置的轴最后全部同时进行返回原点动作。
1. 选择“2.Origin sequence”。
请用光标键(↑/↓)选择“2.Origin sequence”,并按 F1 (EDIT).
2. 设置2台机器人时,选择要设置返回原点顺序的机器人组。
请用光标键(↑/↓)选择机器人组。
3.输入返回原点顺序。
用0~9输入数值,然后按 ENTER 确定输入
4. 按 ESC 退出编辑模式。
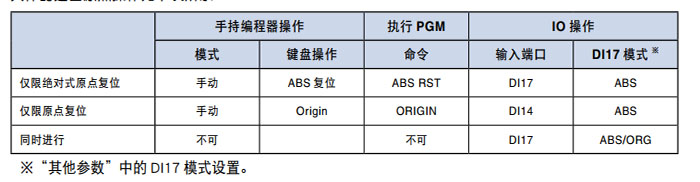
1个机器人上同时存在位置检出方式不同(绝对式规格或增量式规格)的轴时,根据返回原点操作方法决定返回原点动作的顺序会有所不同。
示例:
机器人的轴构成:XYZR
返回原点顺序的设置:312456
各轴的位置检出方式:X,Y轴-增量式规格 Z,R轴-绝对式规格
1. 只进行绝对式原点复位操作时
按照返回原点顺序设置从左到右,只对绝对式规格轴进行返回原点动作。
3 Z轴动作 → 1 X轴取消 → 2 Y轴取消 → 4 R轴动作 → 5 A轴取消 → 6 B轴取消
3. 同时进行绝对式原点复位操作及原点复位操作时
按照最初返回原点顺序设置从左到右,只对绝对式规格的轴进行返回原点动作。
接着,同样只对增量式规格轴进行返回原点动作。
3 Z轴动作 → 1 X轴取消 → 2 Y轴取消 → 4 R轴动作 → 5 A轴取消 → 6 B轴取消
3 Z轴取消 → 1 X轴动作 → 2 Y轴动作 → 4 R轴取消 → 5 A轴动作 → 6 B轴动作
具体的返回原点操作如下所示。
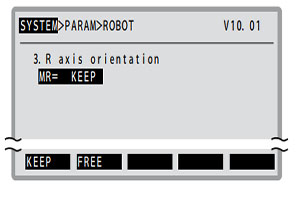
3. R axis orientation/RORIEN
水平多关节型机器人在 XY 坐标上进行手动移动时,设置是否保持 R 轴的方向(姿势)。
参数已初始化时,将设置为“保持”。
设置保持方向时,当将机械臂前端朝着 X 坐标轴方向或 Y 坐标轴方向移动后,R 轴将自动旋转,以便保持当前方向。
对非水平多关节型机器人无效。
1. 选择“3.R axis orientation”。
清用光标键(↑/↓)选择“3.R axis orientation”。,并按 F1 (EDIT).
2. 设置2台机器人时,选择要设置参数的机器人。
请用光标键(↑/↓)选择机器人。
3. 设置参数。
请按 F1 (KEEP)或 F2 (FREE)进行设置。
4. 按 ESC 退出编辑模式。
4.Armtype at PGM reset/ARMTYP
此参数设置程序复位时所选的手系统。
参数已初始化时,将设置为右手系统。
对非水平多关节型机器人无效。
在水平多关节型机器人的 XY 轴上移动时,或者进行坐标点数据的坐标转换(关节坐标
重要。
正交坐标)时,手系统的设置非常
1. 选择“4.Armtype at PGM reset”。
请用光标键(↑/↓)选择“4.Armtype at PGM reset”,并按 F1 (EDIT)
2. 设置2台机器人时,选择机器人。
请用光标键(↑/↓)选择机器人。
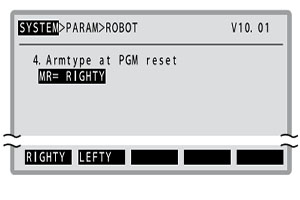
3. 设置机械臂类型。
请按 F1 (RIGHTY)或 F2 (LEFTY)进行设置。
4.按 ESC 退出编辑模式。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532