欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




YAMAHA机器人 RCX340控制柜数据保存/读取详情如下:
数据的保存
将控制器内部存储器的数据保存到 USB 存储器中。
数据被保存在 USB 存储器根目录下的“YAMAHA”文件夹中。
要点:
如果内部存储器由于某种原因被损坏,则可以将保存在 USB 存储器内的数据复原至控制器内部存储器中。
建议在机器人控制器作为系统开始运行时保存。
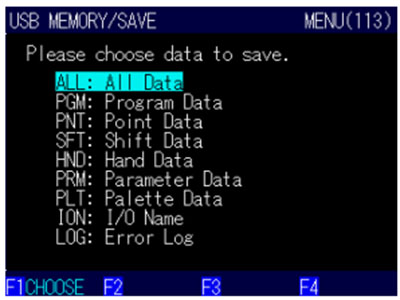
1. 按下 F1 键 (SAVE)。
显示要保存的数据种类。
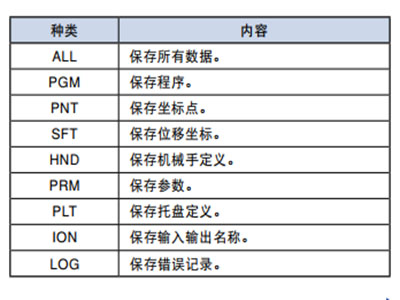
2. 选择要保存的数据种类。
请通过光标键选择要保存的数据种类,然后按下 F1
键 (CHOOSE)。
显示保存文件一览。
3. 选择要保存的文件。
当新建文件保存时,请按下 F1 键 (CHOOSE) 。按
照下列步骤输入文件名。
当进行覆盖保存时,请通过光标键选择要保
存的文件,然后按下 F1 键 (CHOOSE) 或者回
车键。
当所保存的文件数量较多时,请按下 F2 键 (NEXT),
显示文件一览(续)。
4. 保存文件。
输入要保存文件的文件名。
当保存新建文件时,请输入新的文件名。
当覆盖已有文件时,请输入已有的文件名。
按下回车键,文件被保存到 USB 存储器中。
按下 ESC 键,取消保存。
保存过程中将显示“Now Saving”的信息。
5. 注意:
・如果 USB 存储器以及所保存的数据中发生了故障(如破损、错误等),则无法进行数据复原。请务必在个 人电脑等外部存储装置中也保存数据。
・如果在保存数据的过程中发生了异常处理(如电源断电等),则所保存的数据无法得到保证。
・无法保存其它参数的“不加载未定义参数”项目。
数据的读取
将保存在 USB 存储器内的数据复原至控制器的内部存储器中。
数据必须保存在 USB 存储器根目录下的“YAMAHA”文件夹中。
要点:
如果内部存储器因某种原因被损坏时,可将保存在 USB 存储器内的数据复原至控制器的内部存储器中。
建议在机器人控制器作为系统开始运行时保存。
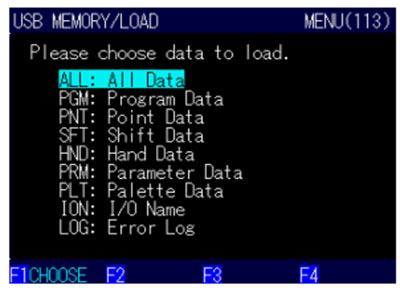
1. 按下 F2 键 (LOAD)。
将显示数据的种类。
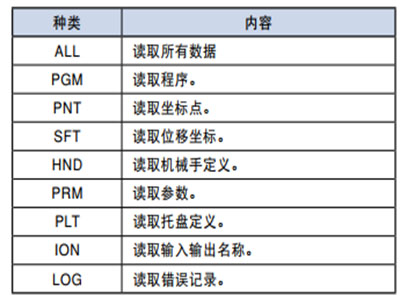
2. 选择要读取的数据种类。
请通过光标键选择要加载的数据种类,然后按下 F1
键 (CHOOSE)。
显示可读取的文件。
3. 选择要读取文件。
请通过光标键选择要加载的文件,然后按下 F1 键
(CHOOSE)。
将显示确认信息。
如果所保存的文件数量较多,请按下 F2 键 (NEXT),
显示文件一览(续)。
4. 读取数据。
按下回车键时,开始从文件中读取数据。
按下 ESC 键时,取消读取。
保存过程中将显示“Now Loading”的信息。
5. 注意:
・当作为 ALL 文件以及参数文件读取数据时,控制器必须处于伺服关闭状态。另外,读取数据之后,将变为 原点复归未完成状态。
・如果 USB 存储器以及所保存的数据中发生了故障(如破损、错误等),则无法进行数据复原。请务必在个 人电脑等外部存储装置中也保存数据。
・如果在保存数据的过程中发生了异常处理(如电源断电等),则所保存的数据无法得到保证。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532