欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




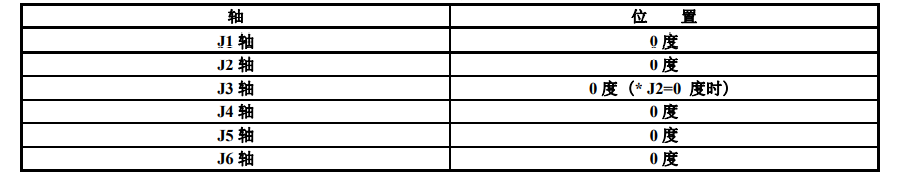
FANUC机器人 R-2000iC全轴零点位置标定详情如下:
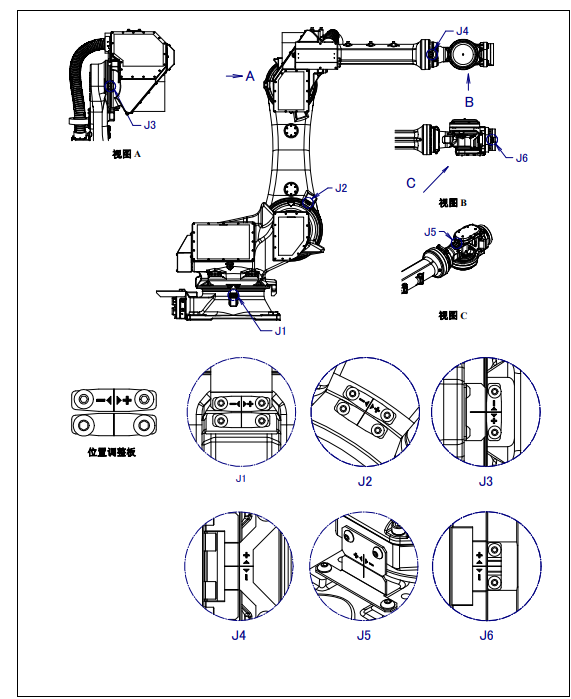
全轴零点位置标定(对合标记零点标定)是在所有轴零度位置进行的零点标定。机器人的各轴,都赋予零位标记(对合标记)。通过这一标记,将机器人移动到所有轴零度位置后进行零点标定。
全轴零点位置标定通过目测进行调节,所以不能期待零点标定的精度。应将零位零点标定作为一时应急的操作来对峙。
全轴零点位置标定
1. 按下“MENU”(菜单)键,显示出画面菜单。
2. 按下“0 下页”,选择“6 系统”。
3. 按下F1“类型”,显示出画面切换菜单。
4. 选择“零点标定/校准”。出现位置调整画面。
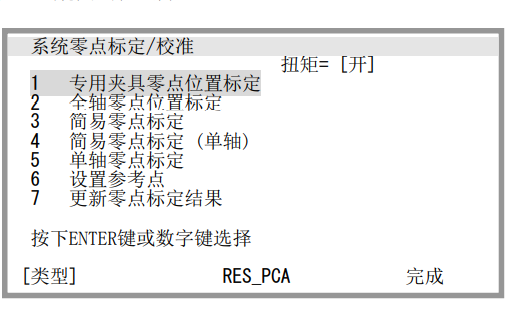
5. 以点动方式移动机器人,使其成为零点标定姿势。请在解除制动器控制后进行操作。
注释:
按照如下所示方式改变系统变量,即可解除制动器控制。
$PARAM_GROUP.$SV_OFF_ALL :FALSE
$PARAM_GROUT.$SV_OFF_ENB[*] :FALSE[所有轴]
改变系统变量后,务必重新接通控制装置的电源。
6. 选择“2 全轴零点位置标定”,按下 F4 “是”。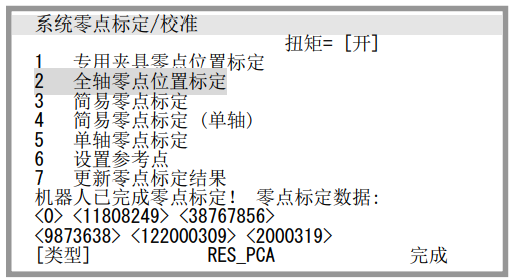
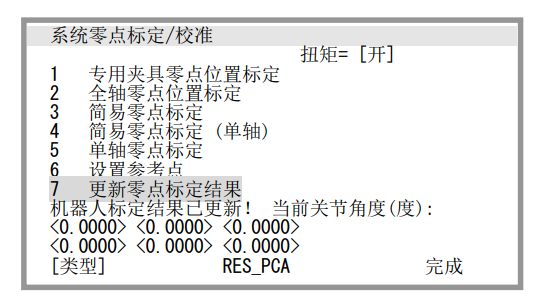
7. 选择“7 更新零点标定结果”,按下 F4 “是”。进行位置调整。或者重新接通电源,同样也进行位置调整。
8. 在位置调整结束后,按下 F5 “完成”。
9. 恢复制动器控制原先的设定,重新通电。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532