欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




通过设定各轴的可动范围,可以将机器人的可动范围从标准值进行变更。
在下面所举的环境下,改变机器人的可动范围将有效。
・ 机器人的使用动作范围受到限制。
・ 存在刀具和外围设备之间干涉的区域。
・ 安装在应用系统上的电缆和软管的长度受到限制。
为避免机器人超出所需的可动范围,备有3种方法进行调节。
・ 基于 DCS 的可动范围限制(所有轴(可选购项))
・ 基于机械式制动器的可动范围限制(J1/J2/J3轴(可选购项))
・ 基于限位开关的可动范围限制(J1轴(可选购项))
警告:
1. 各轴可动范围的变更会对机器人的动作范围产生影响。为了避免出现问题,在变更各轴可动范围之前,要预先充分考虑其会产生的影响。若不加充分考虑就变更可动范围,则有可能导致在以前示教好的位置发生报警等预料不到的情况。
2. 限制可动范围时,为了避免损坏外围设备或危及作业人员,对于J1轴,请使用由于机械式可变制动器的可动范围限制,对于J2/J3轴,请使用由于机械式可变制动器或者 DCS 的可动范围限制。
3. 机械式可变制动器是实际的障碍物, J1/J2/J3 轴的机械式可变制动器的位置可以改变,机器人不能越过机械式可变制动器执行工作。 J5 轴制动器为固定式。J4/J6 轴只通过 DCS 来限制工作范围i。
4. J2轴和J3轴干涉角的变更只能通过机械式制动器来实现。不能通过 DCS 来实现可动范围的变更。
5. 机械式可变制动器通过在碰撞时产生变形来使机器人停止。碰撞过的制动器无法保证原有的强度,极有可能无法使机器人停止,所以发生碰撞后必须要更换新的制动器。
基于DCS的可动范围限制(可选购项)
通过使用下述的软件可选购项,可以基于 DCS (Dual Check Safety)功能,限制机器人的动作。通过使用这个,关于 J2/J3轴,在机器人的动作范围以内,可以在任意角度或者位置对其动作范围进行限制。DCS功能,符合国际安全标准 ISO13849-1和IEC 61508 的要求,已通过标准认证机关的认证。
如果只设置关节位置检查的动作范围,超过机器人的动作范围之后,机器人会停止。机器人惯性移动之后停止,所以实际的机器人停止位置超过机器人动作范围。为了将机器人的停止位置控制在机器人的动作范围内,使用 DCS 停止位置预测功能。标准情况下,停止位置预测功能设定为禁用。
・ DCS位置/速度检查功能(J567)
变更步骤:
1. 按下MENU(菜单)键,显示出菜单画面。
2. 按下“0 下页”,选择“6 系统”。
3. 按下 F1“类型”,显示出画面切换菜单。
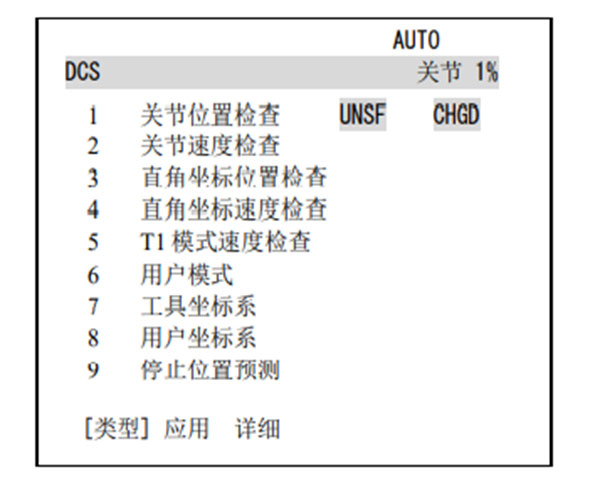
4. 选择“DCS”。出现各轴可动范围设定画面。
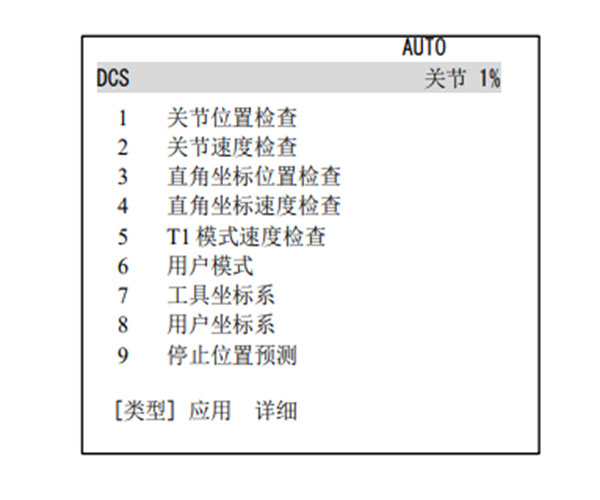
5. 将光标指向[1 关节位置检查],按下[详细]。
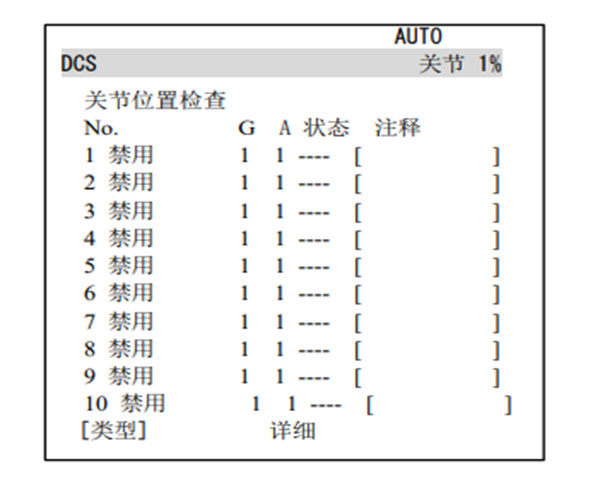
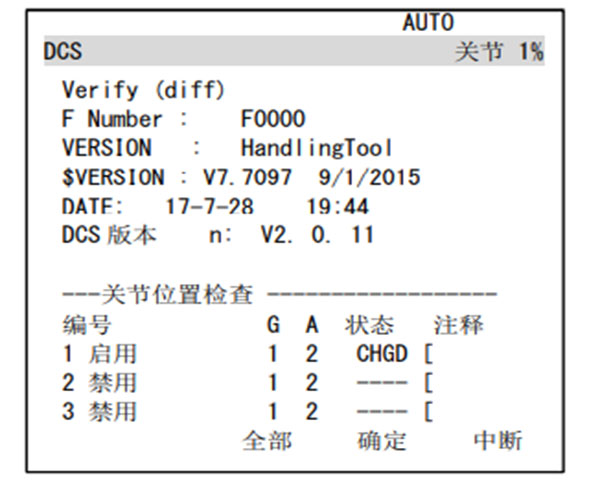
6. 将光标指向[1],按下[详细]。
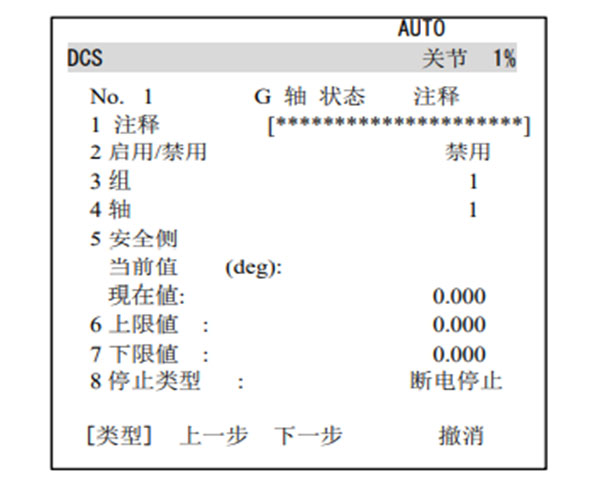
7. 将光标指向[禁用],按下[选择],设置为[启用]。
8. 将光标指向[组],输入对象机器人的组编号,按下[ENTER]键。
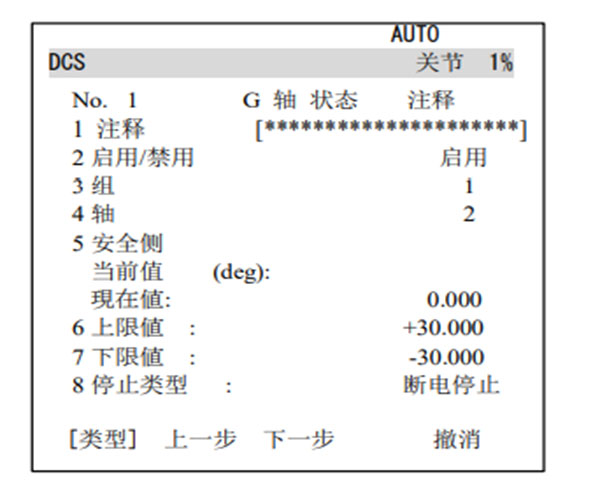
9. 将光标指向[轴]的右侧,输入[2],按下[ENTER]键。
10. 将光标指向[上限值]的右侧,输入[30],按下[ENTER]键。
11. 将光标指向[上限值]的右侧,输入[-30],按下[ENTER]键。
警告;
如果只使用基于关节位置检查的动范围的设置,超过了机器人的动作范围之后,机器人会停止。机器人惯性移动之后停止。所以实际的机器人停止位置会超过机器人动作范围。为了将机器人的停止位置控制在机器人动作范围内,使用 DCS 停止位置预测功能。标准情况下,停止位置预测功能设定为禁用。
12. 按下[前进]键2次,返回到最初的画面。
13. 按下[应用]
14. 输入4位数的密码,按下[ENTER]键。(最初的密码是“1111”)
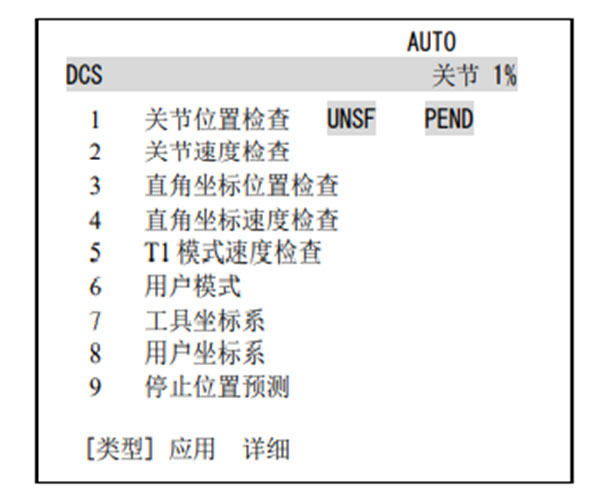
15. 显示如下所示的画面,按下[确定 ]
[1 关节位置检查]右侧的[CHGD]变为[PEND].
16. 要使已经设定的值有效,请暂时断开电源,在冷启动下重新通电。
警告:
要使新的设定有效,必须重新接通控制装置的电源。若不这样做,机器人恐会执行预想不到的动作,由此造成人员受伤,设备受损。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532