欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




负载能力
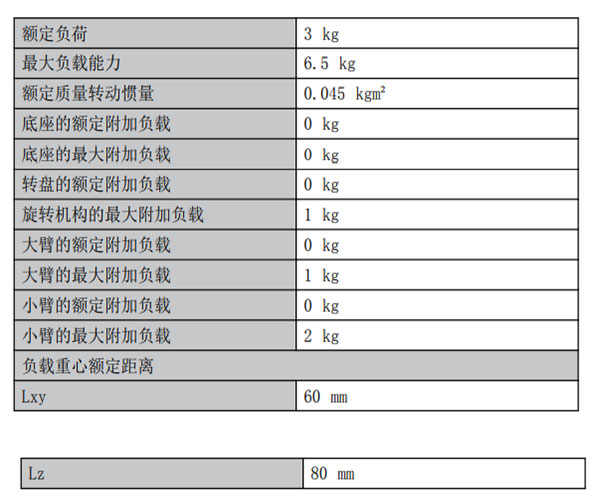
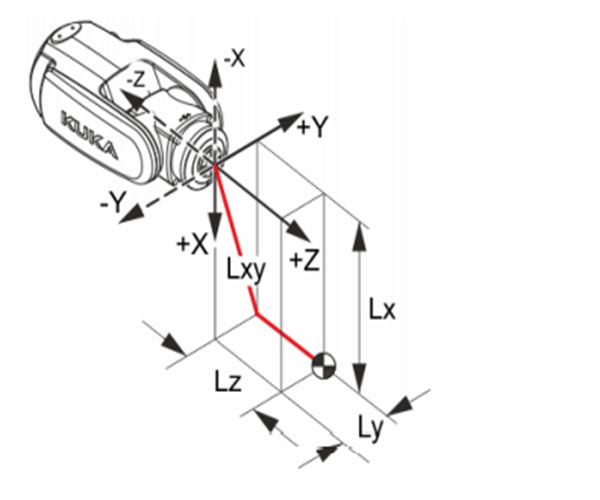
负载重心
所有负载的负载重心与距轴 6 法兰面的距离有关。
负载能力图表
该负载曲线对应于极端负载能力。每次都必须检查两个值(负载能力和质量 惯性矩)。超出时会影响机器人的使用寿命,使电机和齿轮箱过载.

负载能力图表
连接法兰
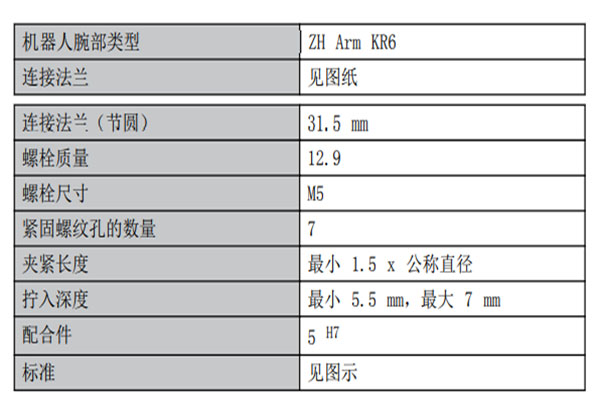

连接法兰
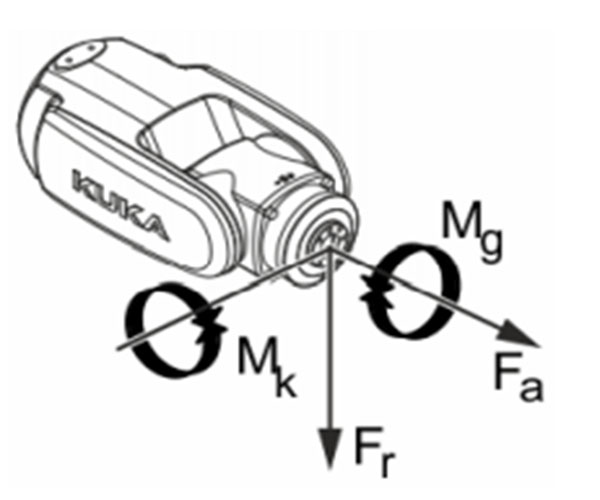
法兰上的负载
通过安装在机器人上的负载的运动(例如工具),作用力和扭矩就会作用在连接法兰上。
此作用力和扭矩取决于移动轨迹及负载的质量、重心和惯性矩。
所给出的数值基于处于额定间距的额定负载,不包含安全系数。
务必将负载数据输入到机器人控制系统中。机器人控制系统在轨迹规划时将负载考虑在内。
负载降低并不会强制产生更小的作用力和扭矩。 数值为通过试验和模拟得出的参考值,基于机器人系列中负载能力最高的机 器。
实际的作用力和扭矩可能会因连接法兰受到的内外部影响或作用点不同而 不同。因此建议在必要时于机器人使用现场的实际条件下测定作用力扭矩和。
运行值可以持续地在正常移动轨迹下得出。建议在设计工具时注意疲劳强度。 在机器人出现紧急状况时会出现紧急停止数值。
由于这种情况在机器人使用寿命中只会极少地出现,因此在大多数情况下静态强度证明即可。
法兰上的负载

联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532