欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




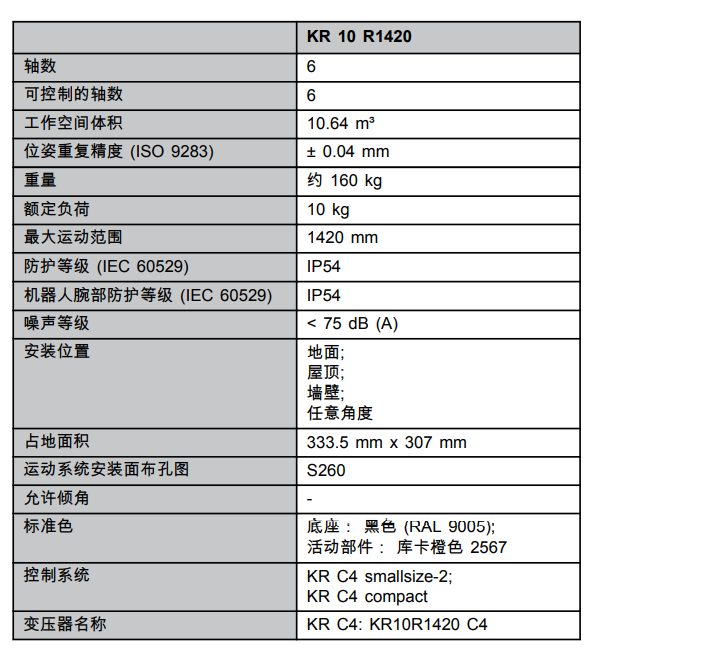
基本数据
环境条件
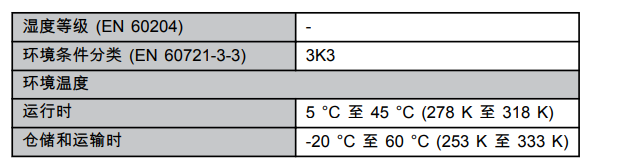
!!!在低温运行范围时可能需要预热机器人。
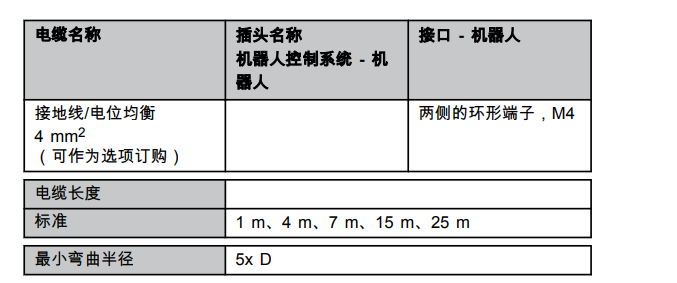
连接电缆

轴数据
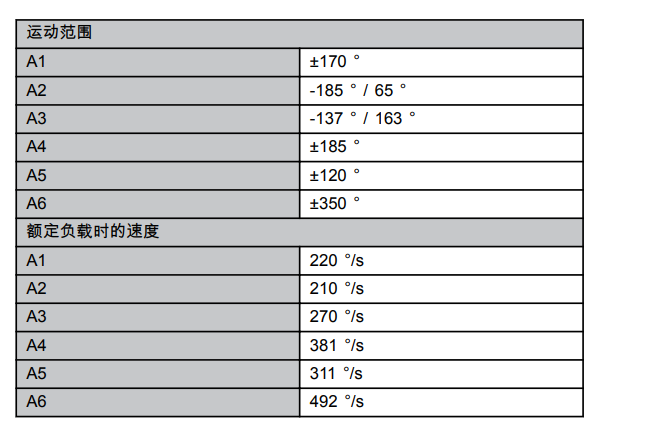
各个轴的运动方向和位置见下图。
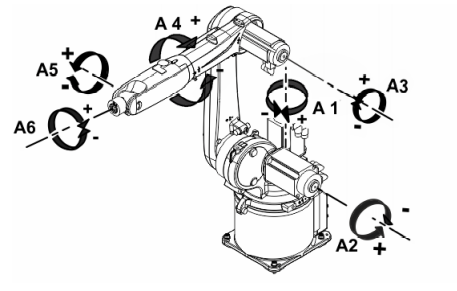
机器人轴的旋转方向
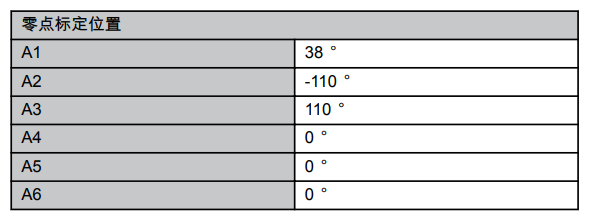
零点标定位置
工作范围
工作范围的参考点是轴4与轴5的交点。
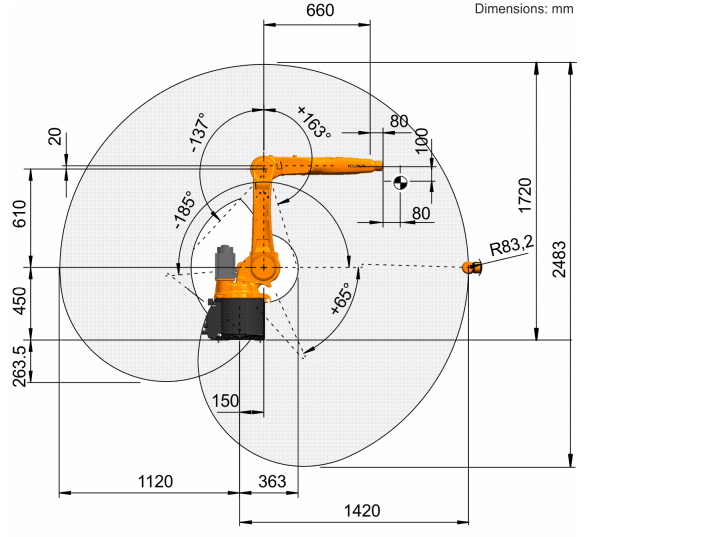
工作区域,侧视图
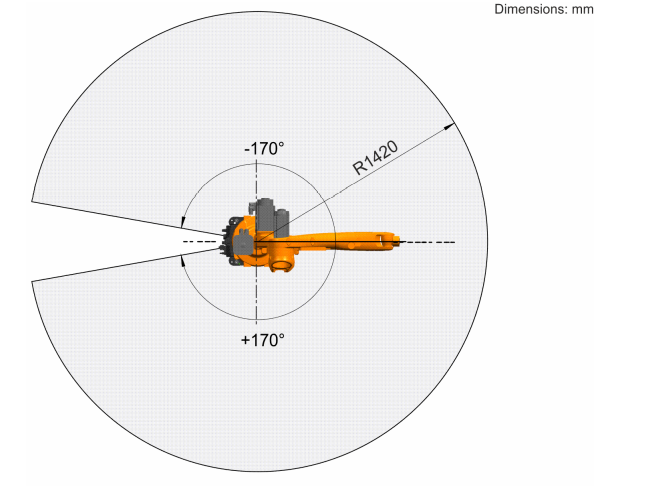
工作区域,俯视图
倾斜位置
机器人可选择介于0°位置(地面)和180°位置(天花板)之间的任何安装位置。在该安装形式下,围绕轴1在正向或负向上的运动范围将受到限制。下图显示了轴1的运动范围在不同的机器人倾斜位置中可能受到的限制。如果不在地面位置运行机器人,则须将机器人的倾斜位置角度正确记录在控制系统中。可在WorkVisual中实现角度配置。
在不改变机器人主作业方向时的倾斜角度:
地面:A:0°、B:0°、C:0°
墙壁:A:0°、B:90°、C:0°
天花板:A:0°、B:0°、C:180°
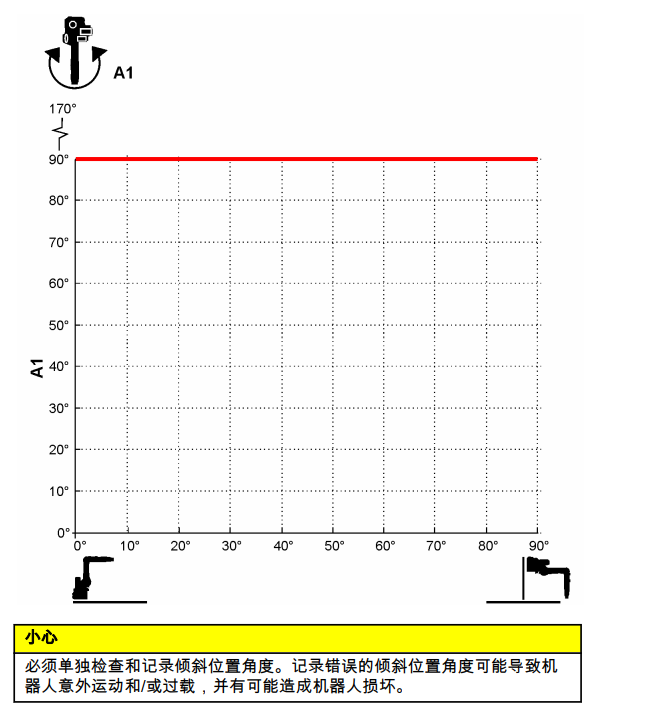
轴1在倾斜位置时的运动范围。
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532