欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




KUKA机器人KUKA.SafeOperation 3.4笛卡尔坐标系详情如下:
坐标系
概览
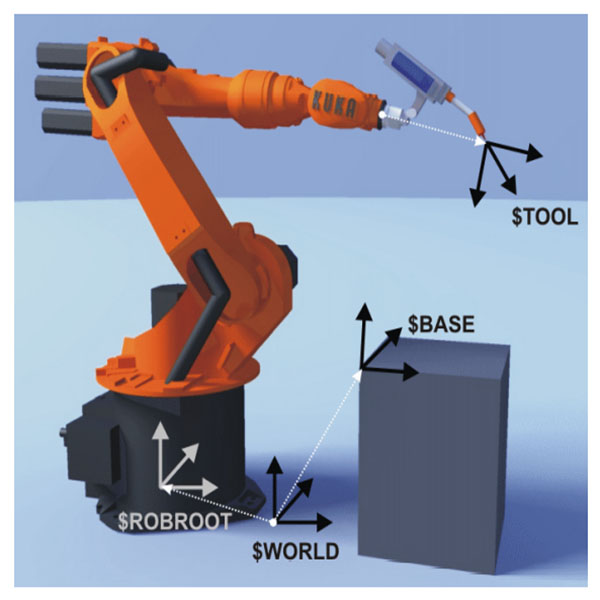
在机器人控制系统中定义了下列笛卡尔坐标系:
• WORLD
• ROBROOT
• BASE
• TOOL
说明:
1.WORLD
WORLD 坐标系是一个固定定义的笛卡尔坐标系。是用于 ROBROOT 坐标系和
BASE 坐标系的原点坐标系。
默认情况下,WORLD 坐标系位于机器人足部中。
2.ROBROOT
ROBROOT 坐标系是一个笛卡尔坐标系,固定位于机器人足部。它以 WORLD 坐
标系为参照说明机器人的位置。
在默认配置中,ROBROOT 坐标系与 WORLD 坐标系是一致的。用 $ROBROOT 可
以定义机器人相对于 WORLD 坐标系的位移。
3.BASE
BASE 坐标系是一个笛卡尔坐标系,用来说明工件的位置。它以 WORLD 坐标
系为参照基准。
在默认配置中,BASE 坐标系与 WORLD 坐标系是一致的。由用户将其移入工件。
4.TOOL
TOOL 坐标系是一个笛卡尔坐标系,位于工具的工作点。
在默认配置中,TOOL 坐标系的原点在法兰中心点上。(因而被称作 FLANGE 坐标系。)
TOOL 坐标系由用户移入工具的工作点。
坐标系的转角:

联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532